Détails
Recommandé
PRODUIT RECOMMANDÉ
Disponible rapidement.Nos produits recommandés sont prêts à l'expédition sous 2 à 11 jours ouvrés.
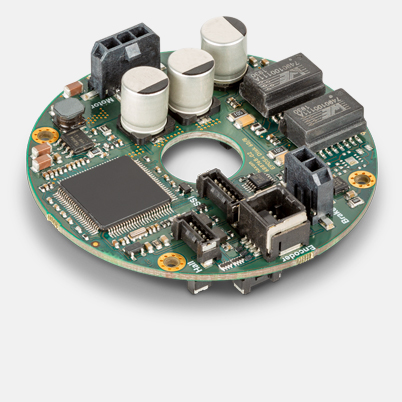
EPOS4 Disk 60/8 EtherCAT, commande digitale de positionnement, 8 A, 12 - 60 VDC
Numéro d'article 688772
| Barème | Quantité | Prix unitaire |
|---|---|---|
| Prix hors TVA, frais d'expédition en sus | 1-4 | 527,60 CHF |
| 5-19 | 464,40 CHF | |
| 20-49 | 399,10 CHF | |
| de 50 | Sur demande |
Spécifications
| Produit | |
| Poids | 26 g |
| Moteur | |
| Moteurs DC jusqu'à | 480 W |
| Moteurs EC jusqu'à | 480 W |
| Capteur | |
| Sans capteur (moteurs DC) | Oui |
| Codeur incrémental digital (2 canaux, single ended) | Oui |
| Codeur incrémental digital (2 canaux, différentiel) | Oui |
| Codeur incrémental digital (3 canaux, différentiel) | Oui |
| Capteurs à effet Hall digitaux (moteurs EC) | Oui |
| Codeur absolu SSI | Oui |
| Modes de fonctionnement | |
| Régulateur de courant | Oui (couple) |
| Régulateur de vitesse | Oui |
| Régulateur de position | Oui |
| Caractéristiques électriques | |
| Tension de service Vcc (min.) | 12 V |
| Tension de service Vcc (max.) | 60 V |
| Alimentation de la logique Vc (min.) | 12 V |
| Alimentation de la logique Vc (max.) | 60 V |
| Tension de sortie max. (facteur * Vcc) | 0.9 |
| Courant de sortie max. Imax | 24 A |
| Durée max. du courant de sortie max. Imax | 10 s |
| Courant de sortie permanent Icont | 8 A |
| Fréquence d'horloge de l'étage de sortie | 50 kHz |
| Fréquence d'échantillonnage du régulateur de courant PI | 25 kHz |
| Fréquence d'échantillonnage du régulateur de vitesse PI | 2.5 kHz |
| Fréquence d'échantillonnage du régulateur de position PID | 2.5 kHz |
| Rendement max. | 98 % |
| Vitesse max. (moteurs DC) | 100000 rpm |
| Vitesse max. (1 paire de pôles) commutation par bloc | 100000 rpm |
| Vitesse max. (1 paire de pôles) commutation sinusoïdale | 50000 rpm |
| Entrées | |
| Signaux capteurs à effet Hall | H1, H2, H3 |
| Signaux du codeur | A, A\, B, B\, I, I\ |
| Fréquence d'entrée max. du codeur | 6.2 MHz |
| Signaux de capteur | Clock, Clock\, Data, Data\ |
| Entrées digitales | 5 |
| Fonctionalités des entrées digitales | limit switch, reference switch, general purpose, touch probe |
| Entrées analogiques | 2 |
| Résolution, plage, circuit | 12 bits, -10…+10 V, diferencial |
| Fonctionalités des entrées analogiques | General Purpose, Set Value Current, Set Value Velocity |
| DIP switch | 6 |
| Fonctionalités du DIP switch | CAN Node-ID, Autobitrate, CAN-Bus Abschluss |
| Sorties | |
| Sorties digitales | 4 |
| Fonctionalités des sorties digitales | Frein de maintien, General Purpose |
| Sorties analogiques | 1 |
| Résolution, plage | 12 bit, -4…+4V |
| Fonctionalités des sorties analogiques | General Purpose |
| Sorties de tension | |
| Tension d'alimentation des capteurs à effet Hall | Voir «Tension d'alimentation de capteur |
| Tension d'alimentation du codeur | Voir «Tension d'alimentation de capteur |
| Tension d'alimentation de capteur | +5 VDC, max. 100 mA |
| Tension de sortie auxiliaire | +5 VDC, max. 145 mA |
| Interfaces | |
| USB (pleine vitesse) | Oui |
| EtherCAT | IEC 61158 Type 12 Slave |
| CoE (CAN application layer over EtherCAT) | CiA 402 |
| FoE (File transfer over EtherCAT) | Oui |
| Distributed Clocks Support | Oui |
| Variable PDO mapping | Oui |
| Indication | |
| Indication d'état "Ready" | LED verte |
| Indication d'état "Error" | LED rouge |
| Indication d'état de l'interface de communication | LED verte |
| Fonction de protection | |
| Fonctions de protection | Limitation de courant, courant de surcharge, température excessive, sous-tension, surtension, transitoires de tension, court-circuit du câble moteur, perte du signal de retour |
| Conditions ambiantes | |
| Température - Service (min.) | -30 °C |
| Température - Service (max.) | 35 °C |
| Température - Plage étendue | +35…+65 °C, Derating: -0.267 A/°C |
| Température - Stockage (min.) | -40 °C |
| Température - Stockage (max.) | 85 °C |
| Humidité atmosphérique (non condensante) (min.) | 5 % |
| Humidité atmosphérique (non condensante) (max.) | 90 % |
| Caractéristiques mécaniques | |
| Poids | 26 g |
| Dimension (longueur) | 60 mm |
| Dimension (largeur) | 60 mm |
| Dimension (hauteur) | 22 mm |
| Fixation | Alésages de fixation des vis M2 |
| Logiciel | |
| Programme d'installation | EPOS Setup |
| Interface graphique utilisateur | EPOS Studio |
| Système d'exploitation | Windows 11, 10 |
| DLL Windows pour PC | 32-/64-bit |
| Exemples de programmation | MS Visual C#, MS Visual C++, MS Visual Basic, MS Visual Basic.NET, Borland C++, Borland Delphi, NI LabView, NI LabWindows/CVI |
| Linux Shared Object Library | X86 32-/64-bit, ARMv6/v7/v8 32-bit, ARMv8 64-bit |
| CAN Interfaces | IXXAT, Vector, National Instruments, Kvaser |
| Exemple de programmation | C++ |
| Fonctions | |
| CANopen Profile Position Mode | Oui |
| CANopen Profile Velocity Mode | Oui |
| CANopen Homing Mode | Oui |
| CANopen Cyclic Synchronuous Position | Oui |
| CANopen Cyclic Synchronuous Velocity | Oui |
| CANopen Cyclic Synchronuous Torque | Oui |
| Valeur de consigne analogique | Oui |
| Position Control Feed Forward | Oui |
| Velocity Control Feed Forward | Oui |
| Réglage dual loop de la position et de la vitesse | Oui |
| Position Marker / Touch Probe | Oui |
| Quickstop | Oui |
| Activation | Oui |
| Contrôle du frein de maintien | Oui |
Description
L'EPOS4 Disk 60/8 EtherCAT est une commande de positionnement dynamique prête au raccordement, de forme ronde, dotée d'un trou central destiné au passage des câbles et de connecteurs montés des deux côtés. Adaptée au pilotage d'un moteur DC avec balais et codeur ou d'un moteur EC sans balais (BLDC) avec capteurs à effet Hall et codeur jusqu'à 480 W/1440 W.Téléchargements
Logiciel/Firmware
Fichiers CAO (DXF, STP,....)
Manuels
-
Anglais
- EPOS4 Feature Chart (english, PDF 3 MB) Version June 2025
- EPOS4 Firmware Specification (english, PDF 10 MB) Version May 2025
- EPOS4 Communication Guide (english, PDF 5 MB) Version March 2021
- EPOS4 Disk 60/8 Hardware Reference (english, PDF 5 MB) Version April 2025
- EPOS4 Application Notes Collection (english, PDF 18 MB) Version April 2025
- EPOS4 Firmware Version Readme (english, PDF 529 KB) Version May 2025
- EPOS4 ESI File (english, ZIP 1 MB) Version 0180h