Details
Empfohlen
EMPFOHLENES PRODUKT
Rasch verfügbar!Unsere empfohlenen Produkte sind innerhalb von 2 – 11 Arbeitstagen versandbereit.
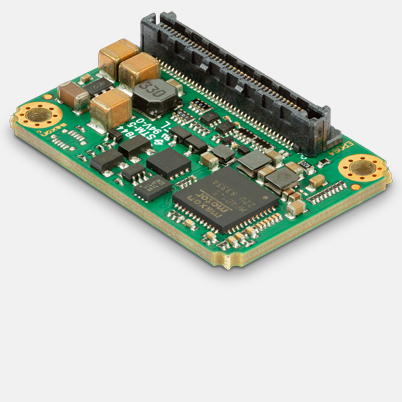
EPOS4 Micro 24/5 CAN, digitale Positioniersteuerung, 5 A, 10-24 VDC
Artikelnummer 638328
| Preisstaffeln | Anzahl | Stückpreis |
|---|---|---|
| Preise exkl. MwSt, zzgl. Versandkosten | 1-4 | CHF 228.50 |
| 5-19 | CHF 201.10 | |
| 20-49 | CHF 172.90 | |
| ab 50 | Auf Anfrage |
Spezifikationen
| Produkt | |
| Gewicht | 6 g |
| Motor | |
| DC-Motoren bis | 120 W |
| EC-Motoren bis | 120 W |
| Sensor | |
| kein Sensor (DC-Motoren) | Ja |
| Digitaler Inkremental-Encoder (2-Kanal, single ended) | Ja |
| Digitaler Inkremental-Encoder (2-Kanal, differentiell) | Ja |
| Digitaler Inkremental-Encoder (3-Kanal, differentiell) | Ja |
| Digitale Hall-Sensoren (EC-Motoren) | Ja |
| SSI Absolut Encoder | Ja |
| Betriebsarten | |
| Stromregler | ja (Drehmoment) |
| Drehzahlregler | Ja |
| Positionsregler | Ja |
| Elektrische Daten | |
| Betriebsspannung Vcc (min.) | 10 V |
| Betriebsspannung Vcc (max.) | 24 V |
| Logikversorgung Vc (min) | 10 V |
| Logikversorgung Vc (max.) | 24 V |
| Max. Ausgangsspannung (Faktor * Vcc) | 0.9 |
| Max. Ausgangsstrom Imax | 15 A |
| Max. Dauer des max. Ausgangsstroms Imax | 10 s |
| Ausgangsstrom dauernd Icont | 5 A |
| Taktfrequenz der Endstufe | 50 kHz |
| Abtastfreuquenz PI Stromregler | 25 kHz |
| Abtastfreuquenz PI Drehzahlregler | 2.5 kHz |
| Abtastfreuquenz PID Positionsregler | 2.5 kHz |
| Max. Wirkungsgrad | 98 % |
| Max. Drehzahl (DC-Motoren) | 100000 min-1 |
| Max. Drehzahl (1 Polpaar) Blockkommutierung | 100000 min-1 |
| Max. Drehzahl (1 Polpaar) Sinuskommutierung | 50000 min-1 |
| Eingänge | |
| Hall-Sensor-Signale | H1, H2, H3 |
| Encoder-Signale | A, A\, B, B\, I, I\ |
| Max. Encoder Eingangsfrequenz | 6.2 MHz |
| Sensor-Signale | Clock, Data |
| Digitale Eingänge | 5 |
| Funktionen der digitalen Eingänge | Endschalter, Referenzschalter, General Purpose, Touch Probe |
| Analoge Eingänge | 2 |
| Auflösung, Bereich, Schaltung | 12-bit, -10…+10V, differentiell |
| Funktionen der Eingänge | General Purpose, Set Value Current, Set Value Velocity |
| Ausgänge | |
| Digitale Ausgänge | 3 |
| Funktionen der digitalen Ausgänge | Haltebremse, General Purpose |
| Analoge Ausgänge | 1 |
| Auflösung, Bereich | 12-bit, -4…+4V |
| Funktionen der analogen Ausgänge | General Purpose |
| Spannungsausgänge | |
| Hall-Sensor-Versorgungsspannung | siehe "Sensor-Versorgungsspannung |
| Encoder-Versorgungsspannung | siehe "Sensor-Versorgungsspannung |
| Sensor-Versorgungsspannung | +5 VDC, max. 145 mA |
| Schnittstellen | |
| RS232 | ja |
| USB (Full Speed) | ja |
| CAN | Ja |
| CANopen | Slave |
| CANopen application layer | CiA 301 |
| CANopen frameworks | CiA 305 |
| CANopen profiles motion control | CiA 402 |
| Gateway Funktion RS232 zu CAN | ja |
| Gateway Funktion USB zu CAN | ja |
| Anzeige | |
| Statusanzeige Bereit | grüne LED |
| Statusanzeige Fehler | rote LED |
| Schutzfunktion | |
| Schutzfunktionen | Strombegrenzung, Überstrom, Übertemperatur, Unterspannung, Überspannung, Spannungstransienten, Kurzschluss der Motorleitung, Verlust des Feedbacksignals |
| Umgebungsbedingungen | |
| Temperatur – Betrieb (min.) | -30 °C |
| Temperatur – Betrieb (max.) | 45 °C |
| Temperatur – Erweitert | +45…+68.8 °C, Derating: -0.210 A/°C |
| Temperatur – Lagerung (min.) | -40 °C |
| Temperatur – Lagerung (max.) | 85 °C |
| Luftfeuchtigkeit (nicht kondensierend) (min.) | 5 % |
| Luftfeuchtigkeit (nicht kondensierend) (max.) | 90 % |
| Mechanische Daten | |
| Gewicht | 6 g |
| Abmessung (Länge) | 32 mm |
| Abmessung (Breite) | 22 mm |
| Abmessung (Höhe) | 7 mm |
| Befestigung | Befestigungsbohrungen für Schrauben M2 |
| Software | |
| Installationsprogramm | EPOS Setup |
| Grafische Benutzeroberfläche | EPOS Studio |
| Betriebssystem | Windows 11, 10 |
| Windows-DLL für PC | 32-/64-bit |
| Linux Shared Object Library | X86 32-/64-bit, ARMv6/v7/v8 32-bit, ARMv8 64-bit |
| CAN Interfaces | IXXAT, Vector, National Instruments, Kvaser |
| Programmierbeispiel | MS Visual C#, MS Visual C++, MS Visual Basic, MS Visual Basic.NET, Borland C++, Borland Delphi, NI LabView, NI LabWindows/CVI |
| Funktionen | |
| CANopen Profile Position Mode | Ja |
| CANopen Profile Velocity Mode | Ja |
| CANopen Homing Mode | Ja |
| CANopen Cyclic Synchronuous Position | Ja |
| CANopen Cyclic Synchronuous Velocity | Ja |
| CANopen Cyclic Synchronuous Torque | Ja |
| Analog Set Value Commands | Ja |
| Position Control Feed Forward | Ja |
| Velocity Control Feed Forward | Ja |
| Dual loop position and Velocity Control | Ja |
| Position Marker / Touch Probe | Ja |
| Quickstop | Ja |
| Enable | Ja |
| Control of holding brakes | Ja |
| Advanced automatic control settings | Ja |
Beschreibung
Die EPOS4 Micro 24/5 CAN ist ein miniaturisiertes OEM Positioniersteuerungs-Modul für die Integration in einachsige oder mehrachsige Motion Control Systeme. Geeignet für die Ansteuerung eines bürstenbehafteten DC-Motors mit Encoder oder eines bürstenlosen EC-Motors (BLDC) mit Hallsensoren und Encoder bis 120 Watt / 360 Watt.Downloads
Software/Firmware
-
English
- EPOS IDX Setup Release Notes (english, PDF 646 KB) Version May 2025
- EPOS Command Library Documentation (english, PDF 5 MB) Version July 2023
- EPOS Windows 32-Bit and 64-Bit DLL (english, ZIP 98 MB) Version 6.8.1.0
- EPOS .Net Library (english, ZIP 32 MB) Version 6.8.1.0
- EPOS LabVIEW VI’s for PC (english, ZIP 19 MB) Version 6.8.1.0
- EPOS Linux Library (ARM/Intel 32/64-Bit) (english, ZIP 7 MB) Version 6.8.1.0
- Setup EPOS, IDX - Studio 3.7 (ZIP -1 bytes) Version 37
CAD-Dateien (DXF, STP,....)
Katalogseiten
Handbücher
-
English
- EPOS4 Feature Chart (english, PDF 3 MB) Version June 2025
- EPOS4 Firmware Specification (english, PDF 10 MB) Version May 2025
- EPOS4 Communication Guide (english, PDF 5 MB) Version March 2021
- EPOS4 Micro 24/5 CAN Hardware Reference (english, PDF 6 MB) Version January 2025
- EPOS4 Application Notes Collection (english, PDF 18 MB) Version April 2025
- EPOS4 Firmware Version Readme (english, PDF 529 KB) Version May 2025